Self-Balanced Car
More contents will be added soon~
Self-Balanced Car is a contest held by my undergraduate scholl - Southeast University.
We needed to build a self-balanced car from zero. Our team soldered the K60 MCU board(Cortex-M4). And we choose the motor driver to drive two DC motors. We used acceleometer and gyroscope to get the angle of the car. We used encoder to get the distance the car has moved. And we used one dimension CCD to detect the track. We received the signal via SPI, IIC and UART protocal. And we added a wireless UART module to help us to upload the program easily. We also used a 2.4GHZ remote control to help us to test the car. We used IAR IDE to design our control plan. We used PID control algorithm and Kalman filter to control the car.
We won the second place in the contest.
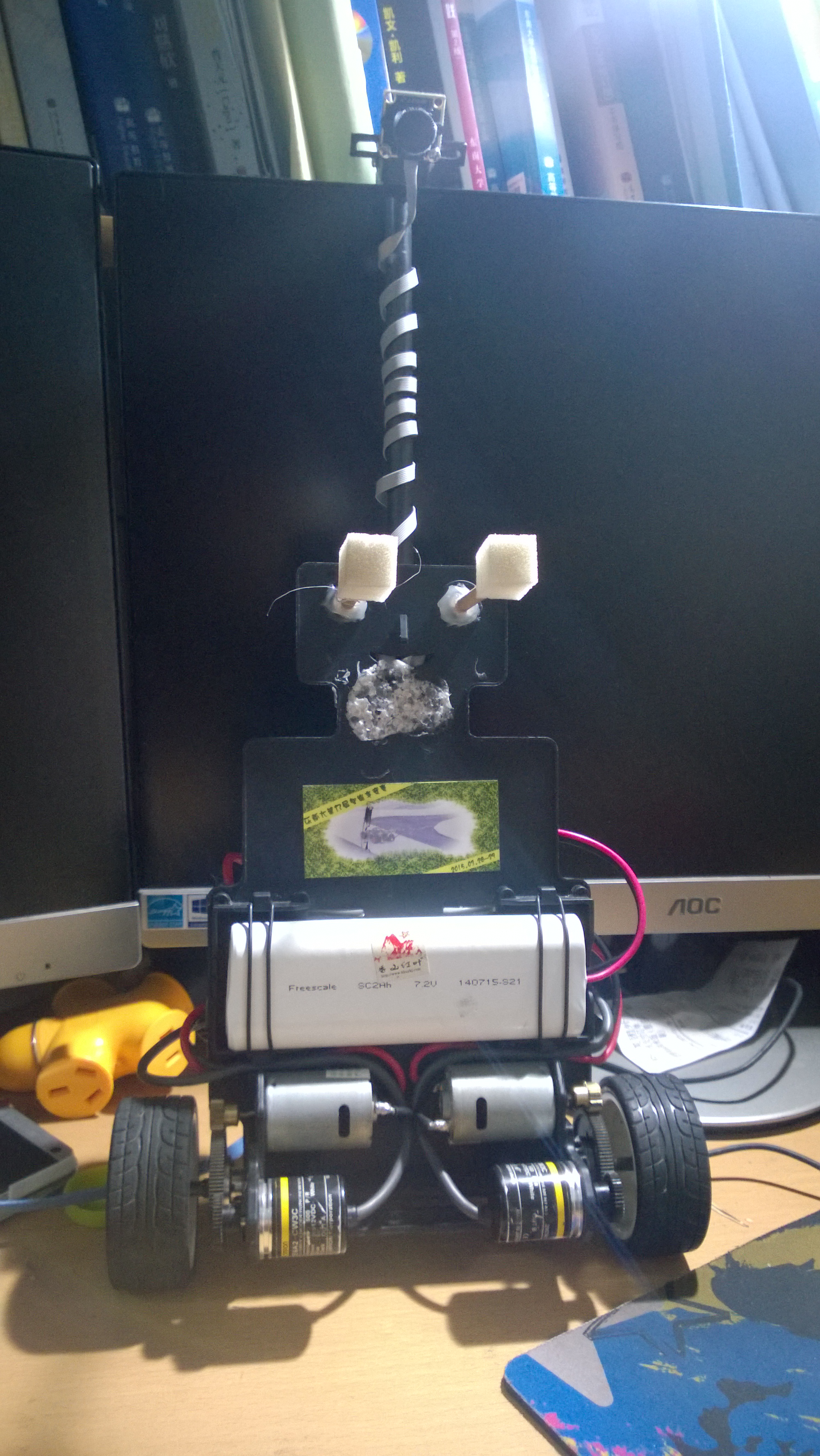
Figure 1: car front
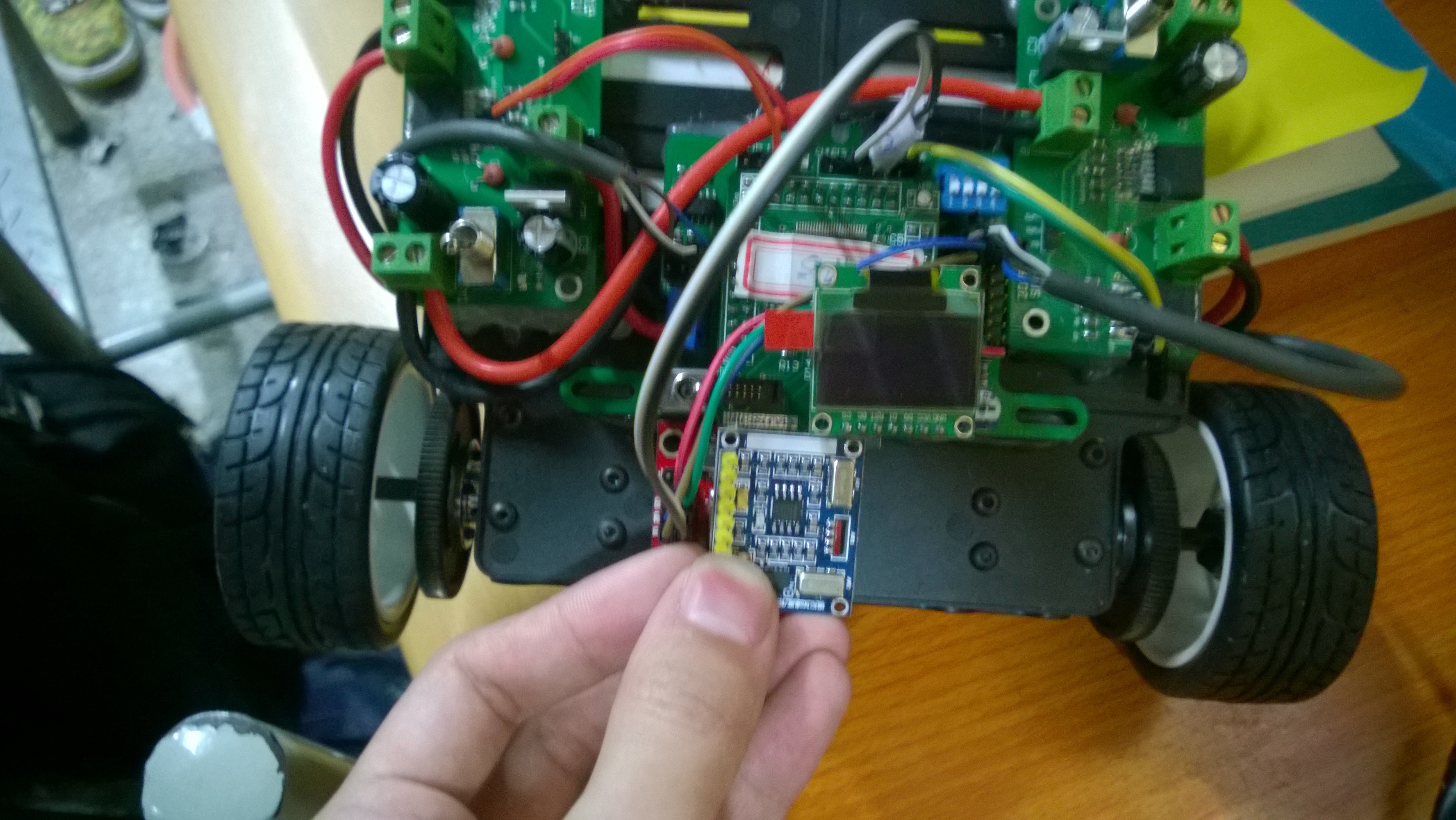
Figure 2: car back
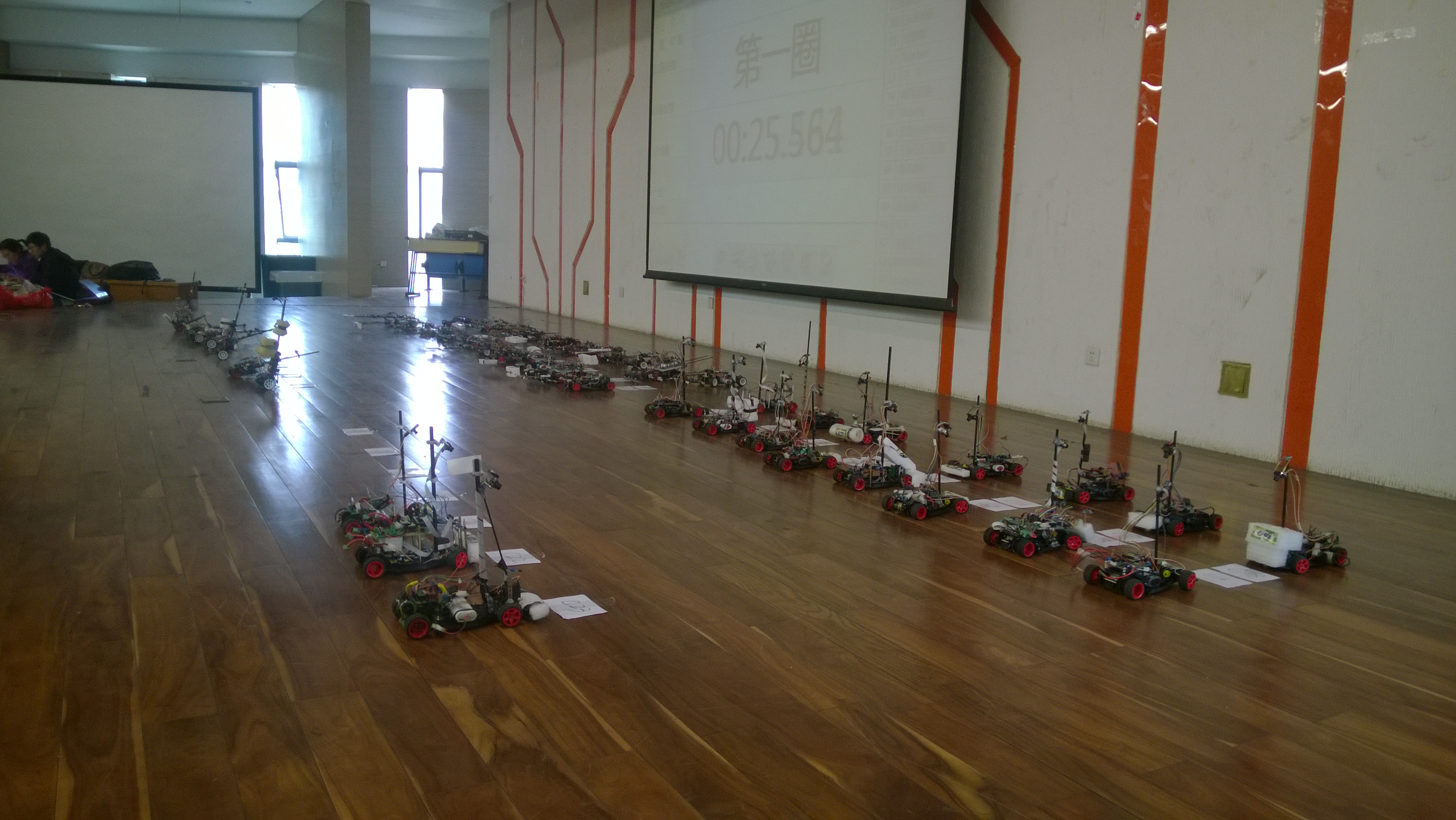
Figure 3: all the cars were placed on the competition site

Figure 4: ready to race
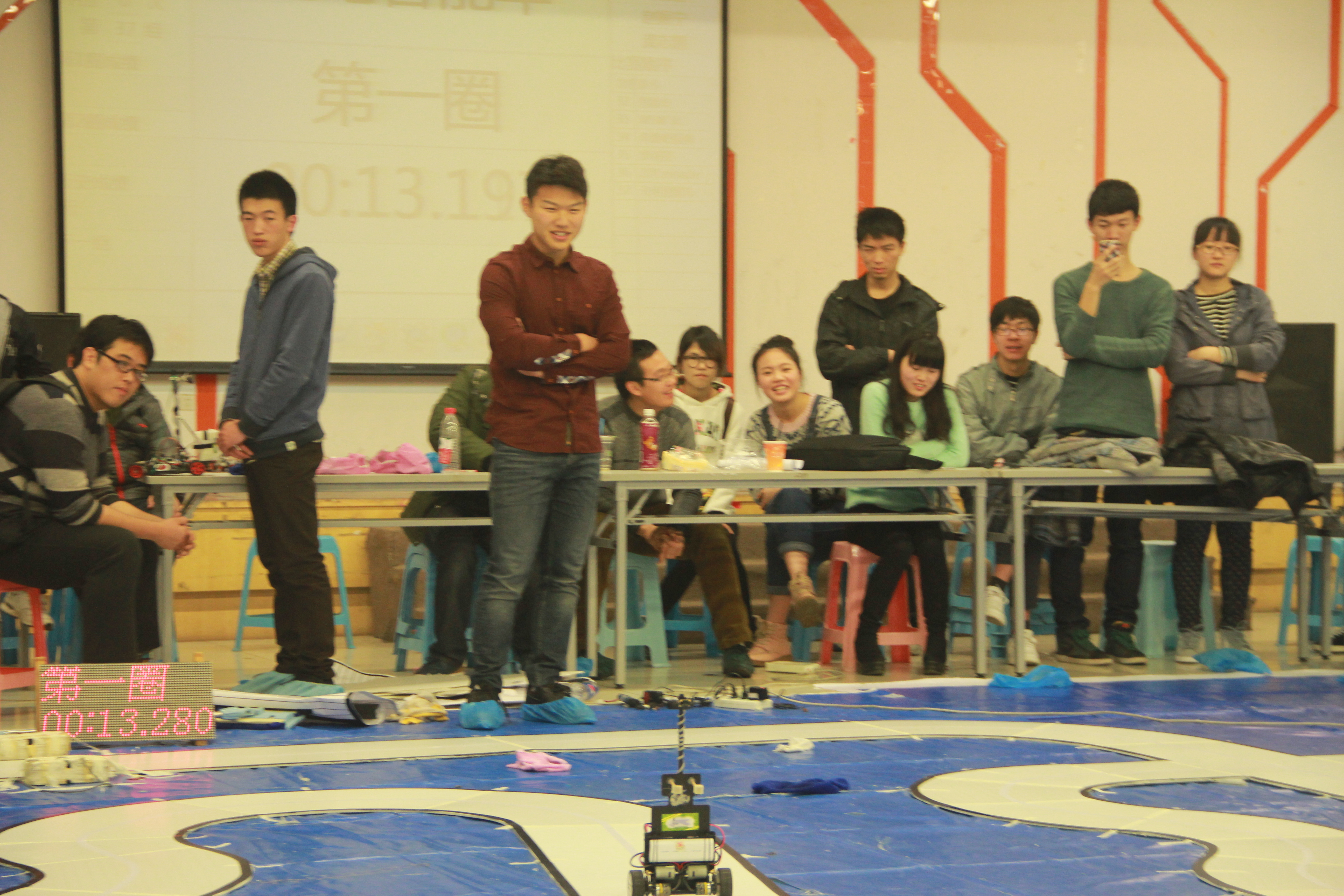
Figure 5: racing

Figure 6: me and my car~
Figure 7: Hi, my teammates~